- Messaggi: 1222
- Ringraziamenti ricevuti 104
Pilotare un servomotore con un potenziometro
10 Anni 11 Mesi fa #16
da StefA
..avevano magari fatto lo sgambetto al ka, ma il sangue restava sempre più denso dell'acqua.. [cit.]
Risposta da StefA al topic Pilotare un servomotore con un potenziometro
se il movimento del potenziometro lo facciamo corrispondere ad una variazione di velocità..quando torna al centro lui diminuisce mano a mano "l'aumento" di velocità fino ad arrivare ad aumento velocità nullo e quindi resta fermo.
Vediamola in un'ottica diversa, fai conto che ogni volta che premo un pulsante il servo ruoti di 1 grado in senso orario. Mettiamo che questo avviene ogni secondo. All'aumentare del valore del potenziometro è come se premessi il pulsante due volte in un secondo.. 3 volte.. ecc..
Quando ritorno col potenziometro al centro.. è come se ripassassi a premere il pulsante 2 volte al secondo..poi una e poi zero..
Ste
Vediamola in un'ottica diversa, fai conto che ogni volta che premo un pulsante il servo ruoti di 1 grado in senso orario. Mettiamo che questo avviene ogni secondo. All'aumentare del valore del potenziometro è come se premessi il pulsante due volte in un secondo.. 3 volte.. ecc..
Quando ritorno col potenziometro al centro.. è come se ripassassi a premere il pulsante 2 volte al secondo..poi una e poi zero..
Ste
..avevano magari fatto lo sgambetto al ka, ma il sangue restava sempre più denso dell'acqua.. [cit.]
Si prega Accedi o Crea un account a partecipare alla conversazione.
- StefA
-

- Moderator
-

Riduci
Di più
10 Anni 11 Mesi fa #17
da shinshi
Risposta da shinshi al topic Pilotare un servomotore con un potenziometro
Credo si debba paragonare il controllo di un braccio robotico con il controllo di un escavatore. Anche il braccio di un escavatore si controlla con 2 joystik, allego uno schema del funzionamento delle leve.
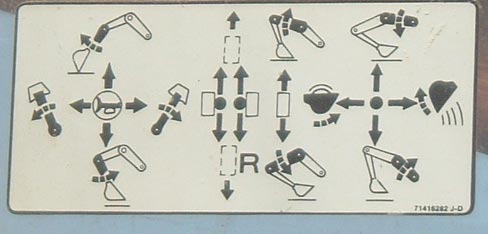
Per esempio spingendo in avanti la leva di destra si può solo alzare il braccio, e per abbassarlo si deve spingere la leva in basso. Quindi se lascio le leve l'escavatore rimane fermo.
Per implementarlo si deve fare in modo che se sposto il potenziometro da metà in senso orario il servo incremente la rotazione in senso orario proporzionalmente a quanto ruoto il potenziometro. Precisando meglio, ruotando poco oltre la metà del potenziometro gli step saranno minimi, continuando a ruotare il potenziometro gli incrementi saranno proporzionalmente più grandi. L'incremento con il potenziometro al centro deve essere pari a 0. Forse si potrebbe anche pensare di mantenere fisso l'incremento ma variare l'intervallo di tempo trà uno step e l'altro. Provandoli entrambi si potrà testare e decidere il migliore dei due sitemi.
Mi pare che StefA ha più o meno questo in mente.
Saluti
Luca
Per esempio spingendo in avanti la leva di destra si può solo alzare il braccio, e per abbassarlo si deve spingere la leva in basso. Quindi se lascio le leve l'escavatore rimane fermo.
Per implementarlo si deve fare in modo che se sposto il potenziometro da metà in senso orario il servo incremente la rotazione in senso orario proporzionalmente a quanto ruoto il potenziometro. Precisando meglio, ruotando poco oltre la metà del potenziometro gli step saranno minimi, continuando a ruotare il potenziometro gli incrementi saranno proporzionalmente più grandi. L'incremento con il potenziometro al centro deve essere pari a 0. Forse si potrebbe anche pensare di mantenere fisso l'incremento ma variare l'intervallo di tempo trà uno step e l'altro. Provandoli entrambi si potrà testare e decidere il migliore dei due sitemi.
Mi pare che StefA ha più o meno questo in mente.
Saluti
Luca
Si prega Accedi o Crea un account a partecipare alla conversazione.
- shinshi
-

- Elite Member
-

Riduci
Di più
- Messaggi: 293
- Ringraziamenti ricevuti 29
10 Anni 11 Mesi fa #18
da StefA
..avevano magari fatto lo sgambetto al ka, ma il sangue restava sempre più denso dell'acqua.. [cit.]
Risposta da StefA al topic Pilotare un servomotore con un potenziometro
Shinshi, hai colto nel segno.. ")
Il braccio meccanico però, quando sarà, lo discuteremo su di un altro post.. per ora non volevo incasinare questo, ma volevo solo implementare una funzione in più del "Pilotare un servomotore con un potenziometro", in ottica futura..
Ste
Il braccio meccanico però, quando sarà, lo discuteremo su di un altro post.. per ora non volevo incasinare questo, ma volevo solo implementare una funzione in più del "Pilotare un servomotore con un potenziometro", in ottica futura..
Ste
..avevano magari fatto lo sgambetto al ka, ma il sangue restava sempre più denso dell'acqua.. [cit.]
Si prega Accedi o Crea un account a partecipare alla conversazione.
- StefA
-
- Moderator
-
Riduci
Di più
- Messaggi: 1222
- Ringraziamenti ricevuti 104
10 Anni 11 Mesi fa #19
da Pinna
Chi vola vale, chi vale vola, chi non vola è un vile
Risposta da Pinna al topic Pilotare un servomotore con un potenziometro
forse ho finalmente capito cosa volete dire ma, per capirci meglio, dividiamo il problema in due parti... la prima parte ruota sul fatto che il joystick ha una molla di richiamo per cui, se io sposto la leva in avanti, il servo ruoterà proporzionalmente allo spostamento che faccio. Se la lascio il joystick tornerà alla posizione neutra ed il servo di conseguenza tornerà alla posizione iniziale... il discorso è logico, non si può restare una vita con la mano attaccata alla leva per tenere il servo nella stessa posizione. Bisogna fare in modo che, una volta posizionato, la mantenga anche se io stacco la mano. La seconda parte del problema, ovvero incrementare la velocità in funzione dello spostamento è a mio avviso un parametro molto serio da tenere in considerazione... un braccio meccanico sicuramente farà minore fatica a sollevare per esempio un peso se la sua velocità aumenta proporzionalmente... volevate dire questo?
Marcello
Marcello
Chi vola vale, chi vale vola, chi non vola è un vile
Si prega Accedi o Crea un account a partecipare alla conversazione.
- Pinna
-
 Autore della discussione
Autore della discussione
- Moderator
-
Riduci
Di più
- Messaggi: 1010
- Ringraziamenti ricevuti 107
10 Anni 11 Mesi fa #20
da StefA
..avevano magari fatto lo sgambetto al ka, ma il sangue restava sempre più denso dell'acqua.. [cit.]
Risposta da StefA al topic Pilotare un servomotore con un potenziometro
penso che adesso ci siamo capiti.. 
Almeno questa è l'idea iniziale che mi è venuta.. inoltre c'è il piano B di shinshi che potrebbe essere migliore o alternativo..

però un servo ha un motoriduttore, quindi credo che anche partendo da zero e andando al massimo sia garantito che sollevi ciò che dichiarano (non dovrebbe andare in stallo), fermorestando lo stess dei vari componenti.
Ste
oltre a questo discorso, c'è da considerare che la leva del joystick mi sa che se sta tutto avanti non riesce ad andare tutto a destra..non si può restare una vita con la mano attaccata alla leva per tenere il servo nella stessa posizione.
mettendo un ciclo fisso ogni tot ms e andando ad incrementare o diminuire il registro del timer, di una quantità dipendente da quanto giro il potenziometro.. dovremmo riuscirci..La seconda parte del problema, ovvero incrementare la velocità in funzione dello spostamento è a mio avviso un parametro molto serio da tenere in considerazione...
Almeno questa è l'idea iniziale che mi è venuta.. inoltre c'è il piano B di shinshi che potrebbe essere migliore o alternativo..
Provando ad alzare un peso di scatto o con calma, si apprezza quanto la calma allunghi la vita dei tuoi muscoli..un braccio meccanico sicuramente farà minore fatica a sollevare per esempio un peso se la sua velocità aumenta proporzionalmente...
però un servo ha un motoriduttore, quindi credo che anche partendo da zero e andando al massimo sia garantito che sollevi ciò che dichiarano (non dovrebbe andare in stallo), fermorestando lo stess dei vari componenti.
Ste
..avevano magari fatto lo sgambetto al ka, ma il sangue restava sempre più denso dell'acqua.. [cit.]
Si prega Accedi o Crea un account a partecipare alla conversazione.
- StefA
-
- Moderator
-
Riduci
Di più
- Messaggi: 1222
- Ringraziamenti ricevuti 104
Registrati al sito
Accedi a tutte le risorse e articoli non visibili pubblicamente, puoi registrarti con pochi passi.