Sensore IR help
12 Anni 7 Mesi fa - 12 Anni 7 Mesi fa #11
da Mauro Laurenti
Risposta da Mauro Laurenti al topic Re: Sensore IR help
Ciao Giovanni,
si B rappresenta il guadagno in corrente del transistor.
Come hai scritto tu è variabile in un range piuttosto ampio ma hai un valore minimo garantito.
Nelle misure che hai tu staresti sotto il valore minimo per questo le misure credo siano errate.
In particolare il multimetro non è idoneo per misurare correnti di natura impulsiva come quella che hai tu.
dovresti usare l'oscilloscopio e misurare la tensione sul resistore da 40ohm.
Vedrai una corrente che ha un andamento come la tensione. Facendo V diviso R avrai la corrente laddove il transistor ha commutato.
Il multimetro misura una tensione/corrente efficace ed è calibrato per tensioni/corrente sinusoidali di 50-60Hz (alcuni modelli fino a qualche centinaio di Hz).
Saluti,
Mauro
si B rappresenta il guadagno in corrente del transistor.
Come hai scritto tu è variabile in un range piuttosto ampio ma hai un valore minimo garantito.
Nelle misure che hai tu staresti sotto il valore minimo per questo le misure credo siano errate.
In particolare il multimetro non è idoneo per misurare correnti di natura impulsiva come quella che hai tu.
dovresti usare l'oscilloscopio e misurare la tensione sul resistore da 40ohm.
Vedrai una corrente che ha un andamento come la tensione. Facendo V diviso R avrai la corrente laddove il transistor ha commutato.
Il multimetro misura una tensione/corrente efficace ed è calibrato per tensioni/corrente sinusoidali di 50-60Hz (alcuni modelli fino a qualche centinaio di Hz).
Saluti,
Mauro
Ultima Modifica 12 Anni 7 Mesi fa da Mauro Laurenti.
Si prega Accedi o Crea un account a partecipare alla conversazione.
- Mauro Laurenti
-

- Moderator
-

Riduci
Di più
12 Anni 7 Mesi fa - 12 Anni 7 Mesi fa #12
da gcupini
Risposta da gcupini al topic Re: Sensore IR help
Ciao Mauro, ciao tutti
Ultimo Aggiornamento sul sensore IR.
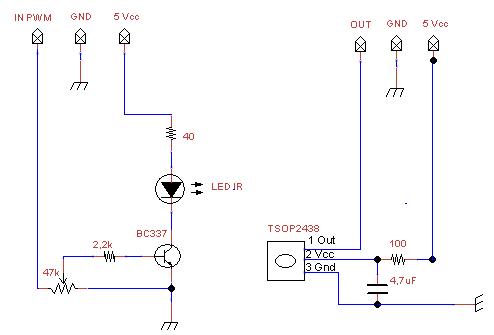
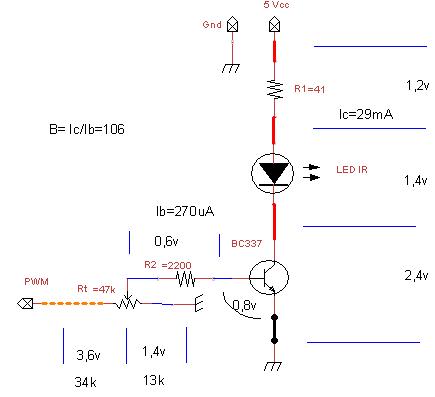
Ho cambiato leggermente il circuito, facendo miei i suggerimenti di Mauro, mettendo il LED a monte del Collettore del BC337 e aggiungendo un resistore di sicurezza sulla Base del transistor da 2,2 k. Ripropongo sotto circuito Emettitore e Ricevitore
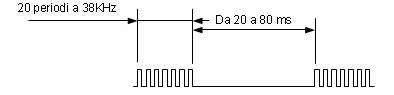
Rimane inalterato il segnale PWM inviato dal PIC ed ha la seguente forma:
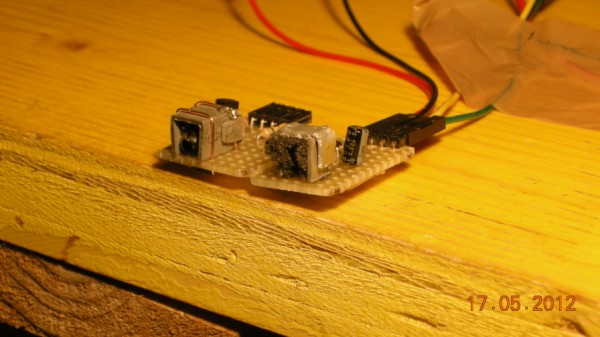
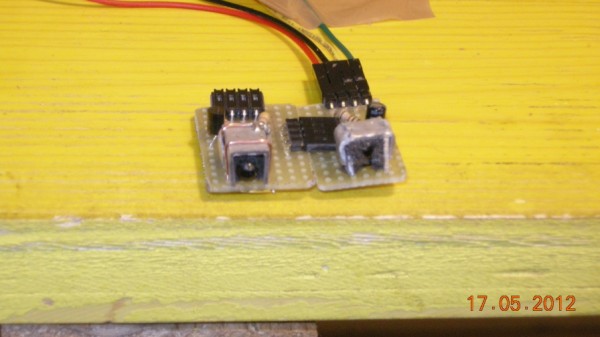
Ho modificato la schedina per meglio “oscurare” i segnali “Spuri” emessi/ricevuti dal retro o dal fianco del LED o del ricevitore. Ho incapsulato sia il LED IR che il TSOP in una piccola capsula di “Alluminio” spessore 0,8mm che protegge retro e fianchi sia del LED che del TSOP. La foto mostra il nuovo sensore con le due “Protezioni”.
Per testare le distanze a cui interviene il sensore ho realizzato il firmware in modo che quando il segnale di output del TSOP, ricevuto dal PIC, è “LOW” accende un LED e al successivo “LOW” lo spegne. Ogni switch del Ricevitore è seguito da un piccolo intervallo di ½ secondo per evidenziare meglio, visivamente sul LED, la commutazione.
Questa situazione consente di tarare (modificare) con il trimmer (a doppio giro) la distanza di intervento del sensore. Azionando il trimmer si hanno le seguenti situazioni:
1) intervallo in cui il segnale PWM è troppo ALTO [il LED lampeggia indipendentemente dagli ostacoli]. Evidentemente arrivano segnali spuri!
2) intervallo in cui il segnale PWM è CORRETTO [Il LED si Accende o spegne solo se si pone un ostacolo di fronte] In questo tratto il trimmer consente di regolare la distanza di intervento fino un Massimo di circa 1 Metro.
3) intervallo in cui il segnale PWM è troppo BASSO [il LED è sempre spento o acceso e insensibile agli ostacoli]
Prima di dare i risultati sulle distanze di intervento è necessaria un premessa. Chi ha usato un sensore a Ultrasuoni tipo SFR04 or 05 sa che si può ottenere la distanza dell'ostacolo con una discreta precisione (circa 1 cm). Con gli infrarossi c'è una dipendenza non solo dalla distanza ma anche dal colore e “ruvidità” dell'ostacolo. Come fare le misure per verificare tali differenze?
La mia scelta è stata quella di usare tre tipi + una di superfici.(dimensione foglio A4 circa)
1) Foglio A4 Bianco carta;
2) Foglio A4 Verde “ruvido”;
3) Foglio A4 Nero “ruvido”;
4) Mano (la mia non è proprio un A4!)
Ecco la tabella con i valori Massimi di intervento per ciascun materiale. La colonna 1 è stata ottenuta cercando con il trimmer la distanza massima (stabile) di intervento. La seconda colonna è stata scelta a caso per confermare/smentire le variazioni ottenute nella prima Colonna. Le altre colonne mostrano le differenze e la Diminuzione % della distanza di intervento.

Rispetto al post di Mauro in cui mi suggeriva di ri-verificare le misure, ho eseguito con il nuovo circuito, usando sia Oscilloscopio che Tester. Premetto che le misure sono abbastanza instabili e con oscillazioni fino al 10%, mi pare di aver ottenuto risultati più credibili. Ecco i dati:
Grazie a tutti per “l'ascolto” e in particolare a Mauro per le preziose indicazioni.
PS: Se di qualche interesse si potrebbe Variare la distanza massima di intervento del sensore, via Firmware. Visto che il sensore commuta sia con un PWM con Duty Cycle 10% che con Duty 90%, perché non agire sul Duty per aumentare o diminuire la potenza del segnale e quindi la distanza? Non so se ho detto una stupidaggine, ma la cosa mi pare possibile? Ma forse il caso non ha alcun interesse pratico ? In fondo è meglio regolare con il trimmer che con il software !
Ancora saluti
Ultimo Aggiornamento sul sensore IR.
Ho cambiato leggermente il circuito, facendo miei i suggerimenti di Mauro, mettendo il LED a monte del Collettore del BC337 e aggiungendo un resistore di sicurezza sulla Base del transistor da 2,2 k. Ripropongo sotto circuito Emettitore e Ricevitore
Rimane inalterato il segnale PWM inviato dal PIC ed ha la seguente forma:
Ho modificato la schedina per meglio “oscurare” i segnali “Spuri” emessi/ricevuti dal retro o dal fianco del LED o del ricevitore. Ho incapsulato sia il LED IR che il TSOP in una piccola capsula di “Alluminio” spessore 0,8mm che protegge retro e fianchi sia del LED che del TSOP. La foto mostra il nuovo sensore con le due “Protezioni”.
Per testare le distanze a cui interviene il sensore ho realizzato il firmware in modo che quando il segnale di output del TSOP, ricevuto dal PIC, è “LOW” accende un LED e al successivo “LOW” lo spegne. Ogni switch del Ricevitore è seguito da un piccolo intervallo di ½ secondo per evidenziare meglio, visivamente sul LED, la commutazione.
Questa situazione consente di tarare (modificare) con il trimmer (a doppio giro) la distanza di intervento del sensore. Azionando il trimmer si hanno le seguenti situazioni:
1) intervallo in cui il segnale PWM è troppo ALTO [il LED lampeggia indipendentemente dagli ostacoli]. Evidentemente arrivano segnali spuri!
2) intervallo in cui il segnale PWM è CORRETTO [Il LED si Accende o spegne solo se si pone un ostacolo di fronte] In questo tratto il trimmer consente di regolare la distanza di intervento fino un Massimo di circa 1 Metro.
3) intervallo in cui il segnale PWM è troppo BASSO [il LED è sempre spento o acceso e insensibile agli ostacoli]
Prima di dare i risultati sulle distanze di intervento è necessaria un premessa. Chi ha usato un sensore a Ultrasuoni tipo SFR04 or 05 sa che si può ottenere la distanza dell'ostacolo con una discreta precisione (circa 1 cm). Con gli infrarossi c'è una dipendenza non solo dalla distanza ma anche dal colore e “ruvidità” dell'ostacolo. Come fare le misure per verificare tali differenze?
La mia scelta è stata quella di usare tre tipi + una di superfici.(dimensione foglio A4 circa)
1) Foglio A4 Bianco carta;
2) Foglio A4 Verde “ruvido”;
3) Foglio A4 Nero “ruvido”;
4) Mano (la mia non è proprio un A4!)
Ecco la tabella con i valori Massimi di intervento per ciascun materiale. La colonna 1 è stata ottenuta cercando con il trimmer la distanza massima (stabile) di intervento. La seconda colonna è stata scelta a caso per confermare/smentire le variazioni ottenute nella prima Colonna. Le altre colonne mostrano le differenze e la Diminuzione % della distanza di intervento.
Rispetto al post di Mauro in cui mi suggeriva di ri-verificare le misure, ho eseguito con il nuovo circuito, usando sia Oscilloscopio che Tester. Premetto che le misure sono abbastanza instabili e con oscillazioni fino al 10%, mi pare di aver ottenuto risultati più credibili. Ecco i dati:
Grazie a tutti per “l'ascolto” e in particolare a Mauro per le preziose indicazioni.
PS: Se di qualche interesse si potrebbe Variare la distanza massima di intervento del sensore, via Firmware. Visto che il sensore commuta sia con un PWM con Duty Cycle 10% che con Duty 90%, perché non agire sul Duty per aumentare o diminuire la potenza del segnale e quindi la distanza? Non so se ho detto una stupidaggine, ma la cosa mi pare possibile? Ma forse il caso non ha alcun interesse pratico ? In fondo è meglio regolare con il trimmer che con il software !
Ancora saluti
Ultima Modifica 12 Anni 7 Mesi fa da gcupini.
Si prega Accedi o Crea un account a partecipare alla conversazione.
- gcupini
- Autore della discussione
- Visitatori
-

12 Anni 7 Mesi fa - 12 Anni 7 Mesi fa #13
da Mauro Laurenti
Risposta da Mauro Laurenti al topic Re: Sensore IR help
Ciao,
...molto chiaro!")
nelle misure che hai fatto ora il B e' salito ma la tensione tra Collettore ed Emittitore e' troppo alta rispetto alla Vce sat tipica dei transistor ed in particolare rispetto a quella del datasheet.
Il B anche se si e' alzato sopra il valore minimo e' probabilmente ancora piu' basso di quello reale.
Saluti,
Mauro
...molto chiaro!
nelle misure che hai fatto ora il B e' salito ma la tensione tra Collettore ed Emittitore e' troppo alta rispetto alla Vce sat tipica dei transistor ed in particolare rispetto a quella del datasheet.
Il B anche se si e' alzato sopra il valore minimo e' probabilmente ancora piu' basso di quello reale.
Saluti,
Mauro
Ultima Modifica 12 Anni 7 Mesi fa da Mauro Laurenti.
Si prega Accedi o Crea un account a partecipare alla conversazione.
Registrati al sito
Accedi a tutte le risorse e articoli non visibili pubblicamente, puoi registrarti con pochi passi.